
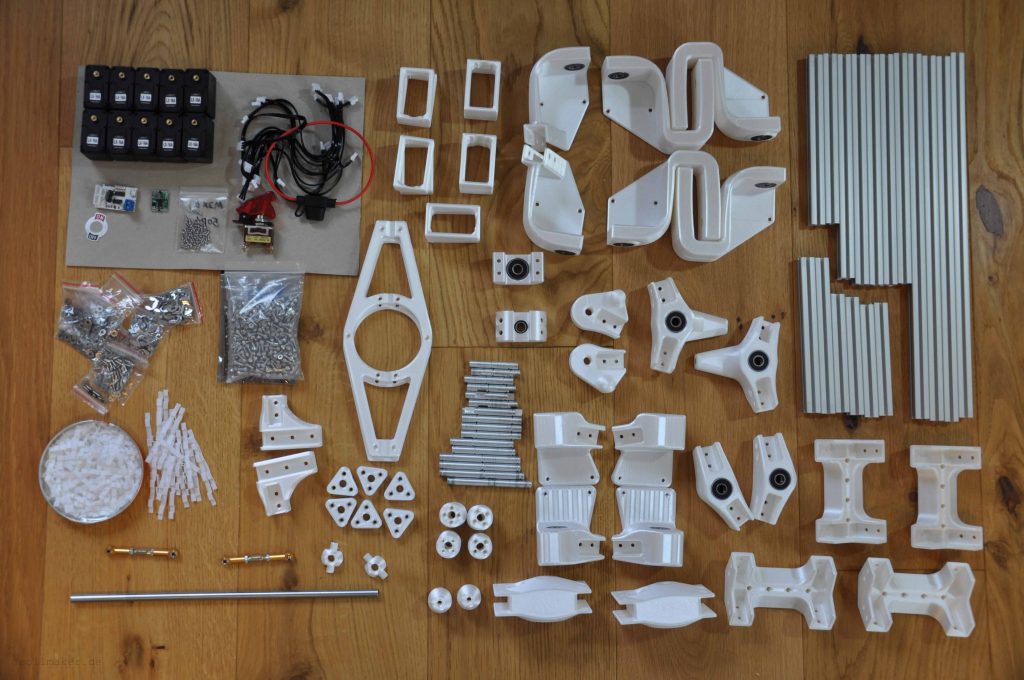
The mechanical structure of Roger Cheng’s Sawppy Rover essentially consists of aluminum profiles that are connected with parts made of plastic. The advantage of this construction is that the aluminum profiles achieve a very high stiffness of the overall structure. In addition, the aluminum profiles are relatively cheap and not so much plastic is needed. How you can procure the components I show you in this post.
The biggest difficulties in building the rover is getting the aluminum profiles and make the 8mm shafts for the rocker axles and bearings.
Aluminium profiles

The aluminum profiles are original from Misumi. In the USA, any private individual can simply order them. In the EU this is only possible for entrepreneurs. If you need some just write me. Possibly I can also make a collective order.
Optionally, you can also order other profiles. The Misumi profiles have the advantage that standard M3 nuts can be pushed into the grooves. With alternative profiles is often the problem that for the attachment of the screws expensive T-slot stones are needed. I have therefore discarded this approach.
8mm Axis
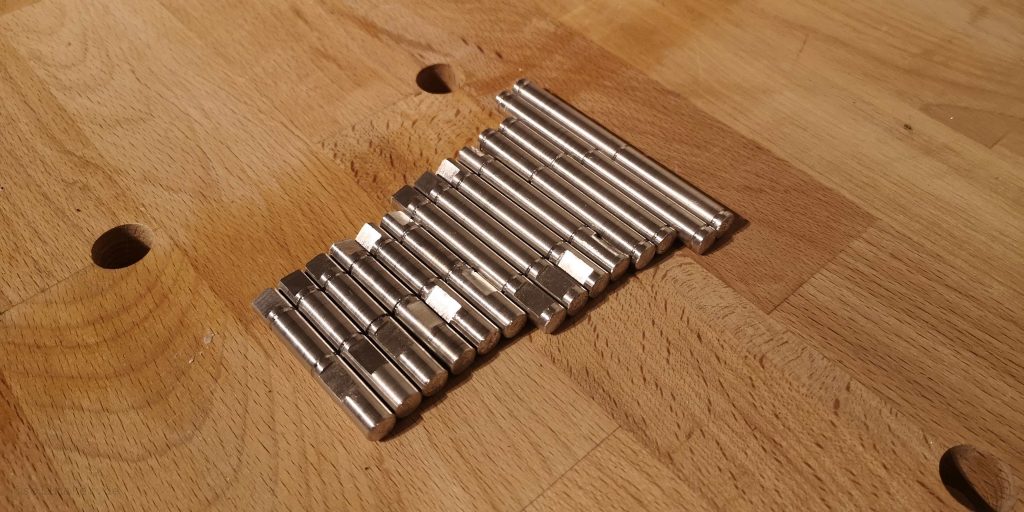
As already mentioned, making the shafts is another difficulty. The shafts have a diameter of 8mm and 2 to 3 grooves are drilled per shaft. Washers, which are inserted into the grooves, secure the bearings against axial displacement. In principle, you can also print the shafts or make them from plastic. However, some makers report that plastic shafts do not last long. Therefore, only stainless steel or aluminum can be considered.
Since I myself do not have a lathe and will process the shafts myself I have decided to use aluminum. The shafts have a diameter of 8mm. To get the grooves in the shafts I will build myself a diy-mini-lathe with a drill as a drive. If that works well, I could make several at once and offer them here. Maybe someone has another idea to make the shafts or to absorb the axial forces without grooves and washers.
Order components

[ Advertisement | the links marked with * are affiliate links ]
I have ordered all components, except for the aluminum profiles, from Aliexpress. My version of the Sawppy Rover will be controlled with a joystick and an Arduino. I still have both of them lying around. But I will provide you with the links anyway. Some components, like a main switch or a voltmeter, are not mandatory, but useful. I mark them with “optional”. In the following list I added to the needed parts how much I actually ordered and what it cost. Altogether I came on part costs of 272,49 €. Later I ordered this charger for 21,63 €, because I had none.
| Description | Pcs. needed | Pcs. ordered | Total cost incl. shipping |
| 15x15x2000mm Aluprofils | 2 | 2 | 33,10€ |
| Alushafts 8mm 500mm | 4 | 5 | 14,13€ |
| Locking Ring (E-Clip) 7mm | 26 | 50 | 2,33€ |
| Set Screws M3 x 8 mm | 22 | 50 | 1,49 |
| Washer M3 | 300 | 300 | 3,60€ |
| LX-16A Servo Motor* | 10 | 10 | 114,10€ |
| Lobot Buslinker* | 1 | 1 | 6,04€ |
| Bearings 608 | 30 | 30 | 8,97€ |
| Screws M3 x 16mm* | 22 | 50 | 2,06€ |
| Screws M3 x 8mm* | 300 | 50 | 1,63€ |
| 12mm ON-OFF Switch* (optional) | 1 | 1 | 1,81€ |
| Voltmeter 0V-30V (optional) | 1 | 1 | 1,2€ |
| Turnbuckles | 2 | 2 | 1,85€ |
| Screws M2 x 6mm* | 40 | 50 | 1,19€ |
| Voltage regulator M1584 | 1 | 1 | 1,56€ |
| 10A Fuse* | 1 | 1 | 1,13€ |
| Akku 5200mAh with XT60 Plug* | 1 | 1 | 18,53€ |
| Nuts M3* | 300 | 300 | 2,64€ |
| M3 Inserts* | 30 | 100 | 2,73€ |
| Sunlu Filament black 1kg* | 1 | 1 | 16,32€ |
| Sunlu Filament white 1kg* | 2 | 2 | 31,02€ |
| XT60 Connectors 10Stk. | 1 | 10 | 4,91€ |
Components for Sawppy controler
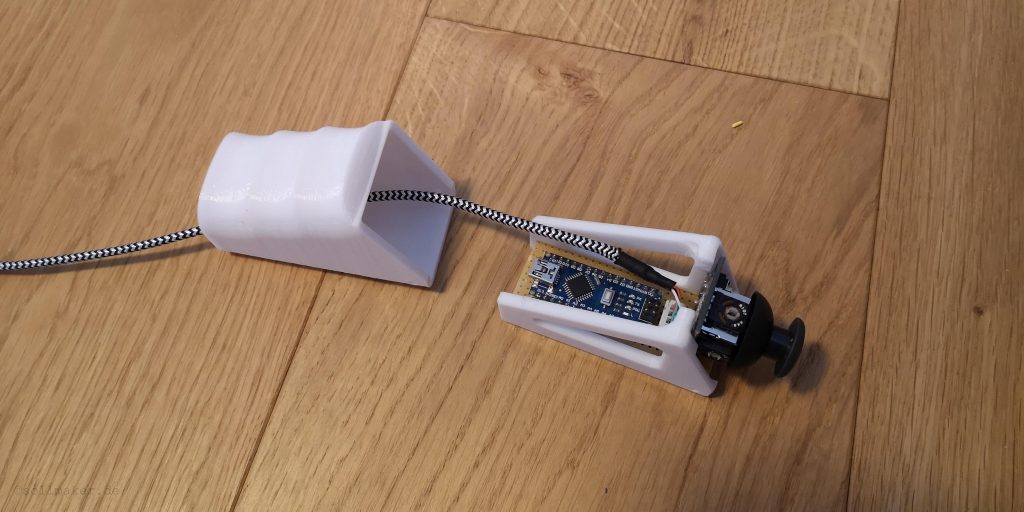
My version of the Sawppy Rover is to be controlled with an Arduino and a joystick in the first step. Roger Cheng has provided the software for the Arduino here. The STL file for the joystick can be found hier.
I had the joystick from an Arduino-Starterkit* from Elego. But you can also buy it separately. Here are the links to the Arduino Nano and the joystick. As cable I just used a USB cable.
| Description | Pcs. needed | Total cost incl. shipping |
| Arduino nano* | 1 | 3,04€ |
| Joystick* | 1 | 1,67€ |
| USB-cable* | 1 | 3,91€ |