
In diesem Projekt werde ich ein autonom fahrendes Fahrzeug bauen. Ich beschäftige mich schon seit ein paar Jahren mit IoT und habe einige Arduino und Raspberry PI im Einsatz. Seit etwa einem Jahr ist ein neues Themenfeld hinzu gekommen: Künstliche Intelligenz. Ich habe mir autodidaktisch über Youtube, Audacity und Udemy die Grundlagen des maschinellen Lernens beigebracht und mit Objekt-Erkennung experimentiert. Zeit alles zusammen zu fügen und ein neues Megaprojekt zu starten.
Mein Wunsch ist ein Fahrzeug zu bauen, das sich autonom bewegen kann. Das Fahrzeug soll mir dabei als Experimentierplattform dienen. Im weiteren Verlauf will ich es um Sensoren und Aktoren erweitern. Es gibt bereits sehr viele Roboter-Fahrzeuge, die sich einer Kamera oder Lidar autonom bewegen können. Die Fahrzeuge sind meist einfache kleine Modellautos mit 4 Rädern die in der Ebene fahren und z.B. einer Linie folgen. Ich möchte jedoch einen Fahrzeug bauen, dass auch in unwegsamen Gelände zurecht kommt. Im ersten Moment fallen einem dabei entweder Kettenfahrzeuge oder Mars-Rover ein.
Sawppy als Grundgerüst
Eine kurze Recherche hat mich auf das Sawppy-Projekt von Roger Cheng aufmerksam gemacht. Der Sawppy Rover ist ein Miniatur-Mars-Rover der ein günstige Version des für Schulungszwecke entwickelten Open Source Rovers vom JPL ist. Roger gibt auf seiner Homepage an, dass der Rover für ca. 500$ gebaut werden kann. Im Gegensatz zum Open Source Rover mit Kosten von ca. 2500$ eine gute Ausgangsbasis für ein privates Projekt.
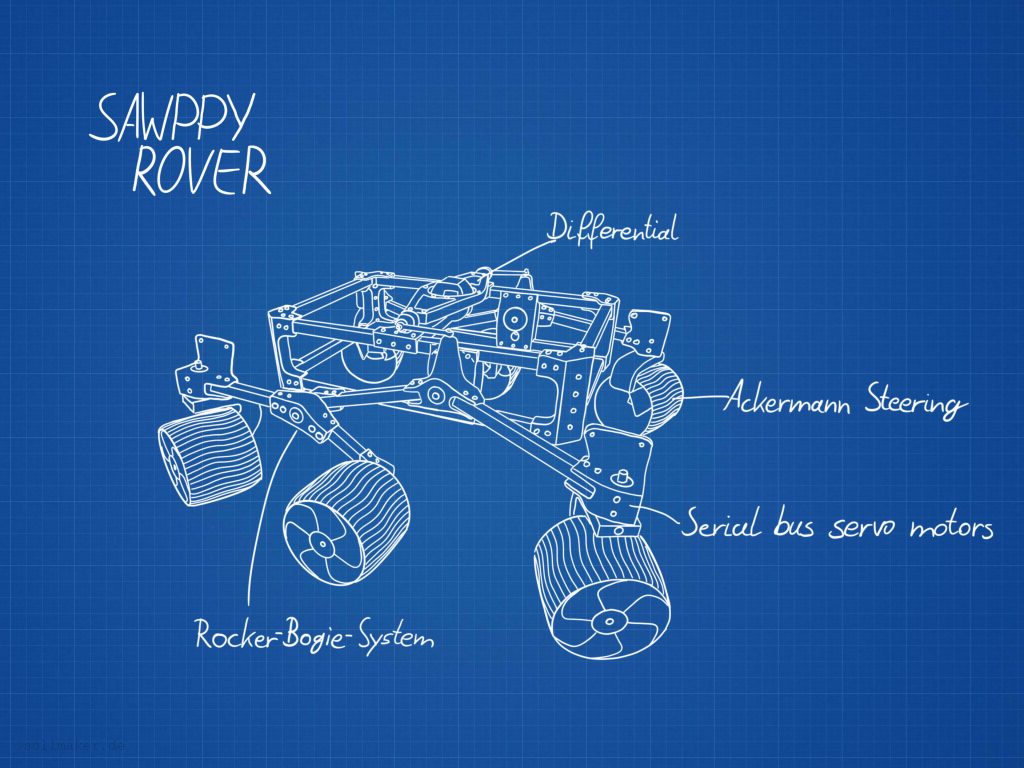
Der Sawppy Rover hat, wie viele Mars Rover, ein Rocker-Bogie Fahrwerk. Dieses hat die NASA 1997 bei der Mars-Mission Pathfinder mit dem Rover Sojourner erprobt. Sie haben es seitdem bei den Rovern Opportunity, Spirit, und Curiosity eingesetzt. Das Fahrwerk zeichnet sich dadurch aus, dass die Räder auf beiden Seiten über Wippen, die sog. „Rocker“, angeordnet sind. Damit werden Unebenheiten bei der Fahrt durch unwegsames Gelände ausgeglichen. Die beiden Hauptwippen sind durch ein Differential miteinander verbunden. Diese Anordnung reduziert die Bewegungen des Chassis. Das ist sinnvoll, da es später als Montageplattform für die Sensoren und ggf. Aktoren dient.
Die mechanische Struktur des Sawppy-Rovers besteht aus 15x15mm Konstruktionsprofilen aus Aluminium. Verbunden werden diese über Kunststoffteile aus dem 3D-Drucker. Die Achsen der Räder und die Lagerungen der Rocker sind mit Standardkugelleger 608 realisiert. Der Rover hat einen Allrad-Antrieb wobei die vier Räder an den Ecken, wie bei den Rovern Opportunity, Spirit und Curiosity, um ein senkrechte Achse gedreht werden können. Damit ist auch ein Drehen auf der Stelle möglich. Insgesamt wird der Rover über 10 Servomotoren angetrieben.
Software
Der Rover soll später einmal mit dem Robot Operating System (ROS) autonom fahren können. Rhys Mainwaring hat auf Github ein ROS Paket zur Verfügung gestellt mit dem der Sawppy mittels Lidar autonom fahren kann. Es soll mir als Basis für mein Vorhaben dienen.
Hardware
Für die reine Navigation auf ebenen Flächen in geschlossenen Räumen ist ein 2D Lidar wohl die beste Wahl. Das Scannen der Umgebung im freien stelle ich mir damit eher schwierig vor. Ich gehe davon aus, dass ich im weiteren Projektverlauf mit dem Lidar an meine Grenzen stoßen werde und eher eine Kamera oder beides verwenden werde. Rhys Mainwaring benutzt einen Raspberry Pi 4. Ich werden in Sachen Hardware auf einen Nvidea Jetson Nano setzen.

Der Jetson Nano ist im Gegensatz zum Raspberry Pi 4 mit einer GPU ausgestattet und hat 4 USB 3.0 an Board. Zudem habe ich noch keinen Jetson Nano und bin gespannt wie das Teil performed.
Welche Teile ihr benötigt um einen Sollmaker Sawppy zu bauen und wo ihr sie her bekommt erfahrt ihr im nächsten Betrag.