
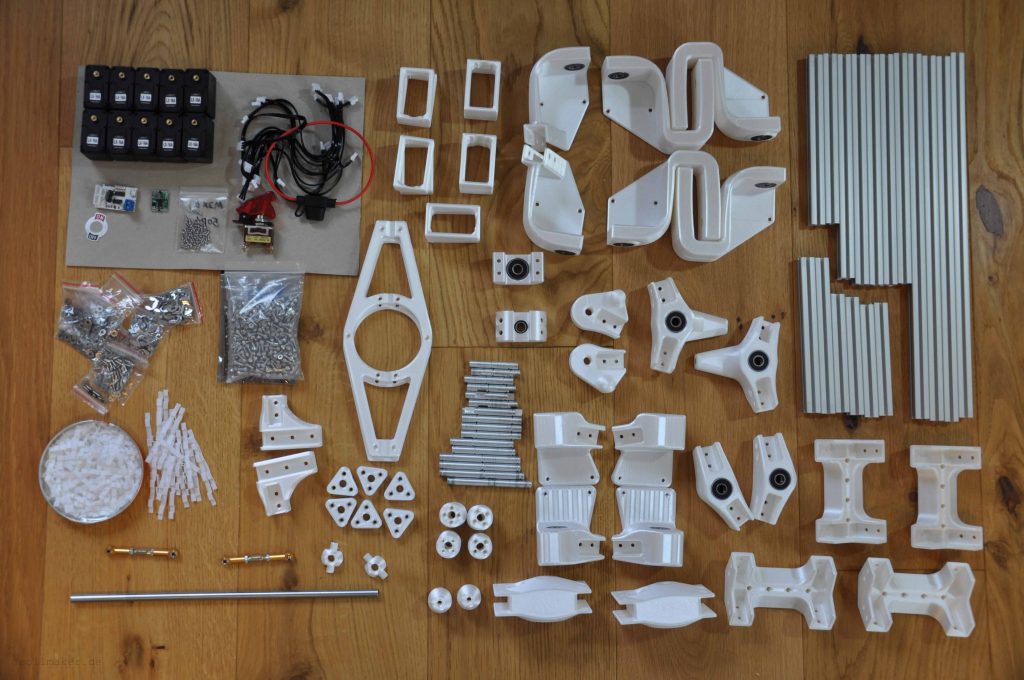
Die mechanische Struktur des Sawppy Rover von Roger Cheng besteht im Wesentlichen aus Aluminium Profilen die mit Teilen aus Kunststoff verbunden sind. Der Vorteil dieser Konstruktion ist, dass durch die Aluminiumprofile eine sehr hohe Steifigkeit der Gesamtkonstruktion erreicht wird. Zudem sind die Aluminiumprofile relativ günstig und es wird nicht so viel Kunststoff benötigt. Wie ihr die Bauteile beschaffen könnt zeige ich euch in diesem Beitrag.
Die größten Schwierigkeiten beim Bau des Rovers ist die Beschaffung der Alu-Profile und die Bearbeitung der 8mm Wellen für die Achsen und Lager der Rocker.
Aluprofile

Die Aluprofile sind im Original von Misumi. In den USA kann jede Privatperson diese einfach bestellen. In der EU ist das nur für Unternehmer möglich. Falls ihr welche benötigt schreibt mich einfach an. Evtl. kann ich auch eine Sammelbestellung machen.
Optional könnt ihr auch andere Profile bestellen. Die Misumi Profile haben den Vorteil, dass standard M3-Mutter in die Nuten geschoben werden können. Bei alternativen Profilen ist oft dass Problem, dass für die Befestigung der Schrauben teure T-Nuten-Steine benötigt werden. Ich habe diesen Ansatz deswegen wieder verworfen.
8mm Achsen
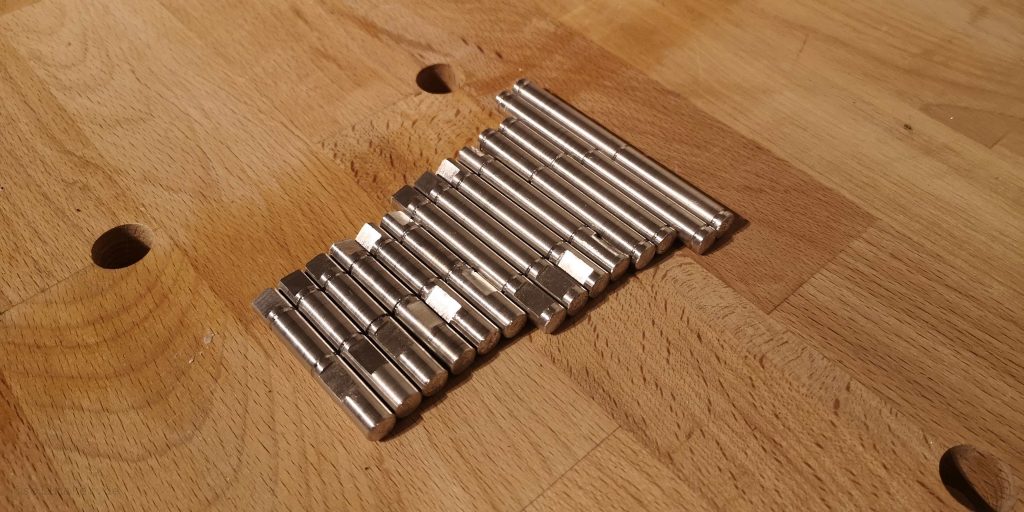
Wie schon gesagt ist das Bearbeiten der Wellen eine weitere Schwierigkeit. Die Wellen haben einen Durchmesser von 8mm und es werden pro Welle 2 bis 3 Nuten eingearbeitet. Scheiben, die in die Nuten gesteckt werden, sichern die Lager gegen axiales Verschieben. Die Wellen könnt ihr prinzipiell auch drucken oder aus Kunststoff fertigen. Allerdings berichten einige Maker, dass die Kunststoffwellen nicht lange halten. Kommt also nur Edelstahl oder Aluminium in Betracht.
Da ich selbst keine Drehbank habe und die Wellen selbst bearbeiten werde habe ich mich für Aluminium entschieden. Die Wellen haben einen Druchmesser von 8mm. Das hält. Um die Nuten in die Wellen zu bekommen werde ich mir behelfsmäßig eine Mini-Drehbank mit einer Bohrmaschine als Antrieb bauen. Wenn das gut funktioniert könnte ich auf einen Schlag auch mehrere fertigen und hier anbieten. Evtl. hat noch jemand eine andere Idee um die Wellen zu bearbeiten bzw. die axialen Kräfte ohne Nuten und Scheiben aufzunehmen.
Bauteile bestellen

[ Werbung | die mit * gekennzeichneten Links sind Affiliate-Links ]
Ich habe, bis auf die Aluprofile, alle Bauteile bei Aliexpress bestellt. Meine Version des Sawppy Rovers werde ich zunächst mit einem Joystick und einem Arduino ansteuern. Das hab ich beides noch hier herum liegen. Ich werde euch aber trotzdem die Links dazu bereitstellen. Einige Bauteile, wie ein Hauptschalter oder eine Spannungsanzeige, sind nicht zwingend notwendig, aber sinnvoll. Ich kennzeichne diese mit „optional“. In der nun folgenden Liste habe ich zu den benötigten Stückzahlen auch immer noch dazu geschrieben wieviel ich tatsächlich bestellt habe und was es gekostet hat. Insgesamt bin ich auf Teilekosten von 272,49 € gekommen. Nachträglich habe ich noch diese Ladegerät für 21,63 € bestellt, da ich keines hatte.
| Bezeichnung | Stk. benötigt | Stk. bestellt | Gesamtkosten inkl. Versandt |
| 15x15x2000mm Aluprofil | 2 | 2 | 33,10€ |
| Aluwellen 8mm 500mm | 4 | 4 | 27,16€ |
| Sicherungsring (E-Clip) 7mm | 26 | 50 | 0,46€ |
| Madenschraube M3 x 8 mm | 22 | 50 | 0,46€ |
| Unterlegscheibe M3 | 300 | 300 | 3,60€ |
| LX-16A Servo Motor* | 10 | 10 | 114,10€ |
| Lobot Buslinker* | 1 | 1 | 6,04€ |
| Kugellager 608 | 30 | 30 | 8,97€ |
| Schrauben M3 x 16mm* | 22 | 50 | 2,06€ |
| Schrauben M3 x 8mm* | 300 | 50 | 1,63€ |
| 12mm ON-OFF Kippschalter* (optional) | 1 | 1 | 1,81€ |
| Voltmeter 0V-30V (optional) | 1 | 1 | 1,2€ |
| Koppelstangen | 2 | 2 | 1,85€ |
| Schrauben M2 x 6mm* | 40 | 50 | 1,19€ |
| Spannungsregler M1584 | 1 | 1 | 1,56€ |
| 10A Sicherung* | 1 | 1 | 1,13€ |
| Akku 5200mAh mit XT60 Stecker* | 1 | 1 | 18,53€ |
| Mutter M3* | 300 | 300 | 2,64€ |
| M3 Inserts* | 30 | 100 | 2,73€ |
| Sunlu Filament schwarz 1kg* | 1 | 1 | 16,32€ |
| Sunlu Filament weiß 1kg* | 2 | 2 | 31,02€ |
| XT60 Stecker 10Stk. | 1 | 10 | 4,91€ |
Bauteile für die Steuerung von Sawppy
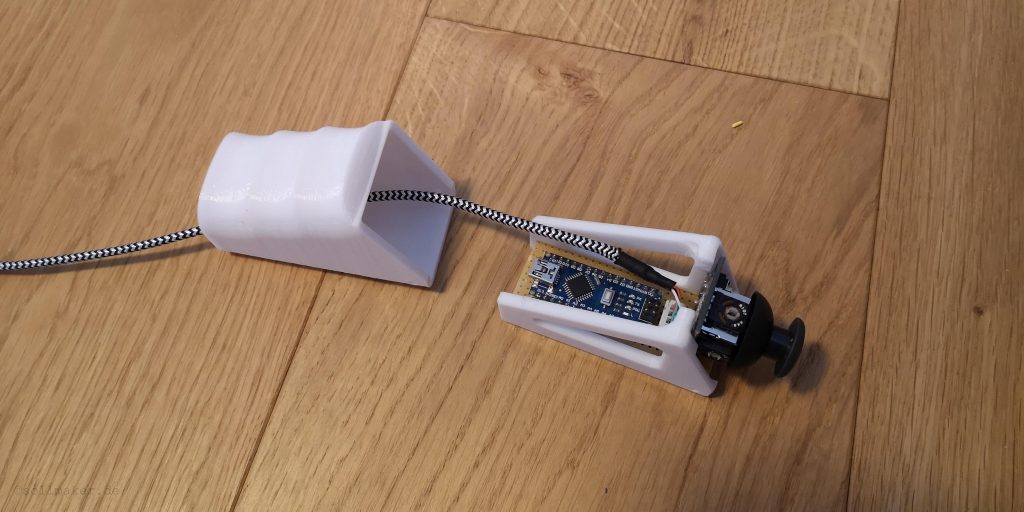
Meine Version des Sawppy Rover soll im ersten Schritt mit einem Arduino und einem Joystick gesteuert werden. Roger Cheng hat die Software für den Arduino dafür hier bereitgestellt. Das STL-File für den Joystick ist hier zu finden.
Den Joystick hatte ich noch aus einem Arduino-Starterkit* von Elego. Ihr könnt das aber auch einzeln kaufen. Hier die Links zum Arduino Nano und dem Joystick. Als Kabel habe ich einfach ein USB-Kabel verwendet.
| Bezeichnung | Stk. benötigt | Gesamkosten inkl. Versandt |
| Arduino nano* | 1 | 3,04€ |
| Joystick* | 1 | 1,67€ |
| USB-Kabel* | 1 | 3,91€ |
Pingback:Sollmaker Sawppy #1 - Ein autonom fahrender Rover - sollmaker